 | 直角三角形3軸配置、30度の角で駆動し60度、90度の角でトルクを半分ずつ負担、回転方向30,90,60度の順、プーリ径はすべて同じ、の場合の取付張力と駆動中の各ベルトの張力の関係式、考え方について教えてください. |
 | ご提示頂いた3軸配置について,ベルトに生じる各張力について回答させて頂きます.プーリ1は反時計回りに回転し,ベルトはプーリ1→プーリ3→プーリ2と周回します.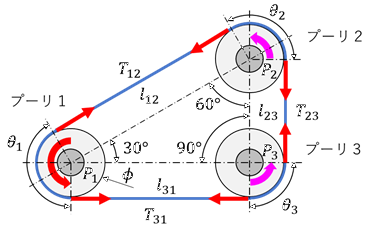 まず,動力から各プーリに巻き付いているベルトの有効張力  , , , , を計算します. を計算します.プーリ1,2,3に作用するトルクをそれぞれ  , , , , とすれば, とすれば,   となります.ここで,  はプーリ直径です.もしくは,動力ベースで考えれば,プーリ1の回転数を はプーリ直径です.もしくは,動力ベースで考えれば,プーリ1の回転数を [rpm]とすると,ベルト周速 [rpm]とすると,ベルト周速 [m/s]は [m/s]は となり,有効張力と動力  , , , , との関係は との関係は   となります.ここで  です. です.次に,2つの従動プーリの伝達動力を受け持つ原動プーリ1について,最もスリップしやすいと仮定し,プーリ1に作用する張力について考えれば,2軸伝動の際と同様に これが,プーリ1(原動プーリ)でスリップすると考えた場合の張力の考え方になります. |
多軸伝動レイアウトでの張力について教えてください


 および
および は,ベルト-プーリ間の最大摩擦係数および遠心張力(
は,ベルト-プーリ間の最大摩擦係数および遠心張力( )となります(ベルトの周速が十分小さい場合,
)となります(ベルトの周速が十分小さい場合,


 ,
, ,
, を平均すれば良いですが,各スパンの長さ
を平均すれば良いですが,各スパンの長さ ,
, ,
, が異なる場合,それぞれのスパンでのベルトの伸びを考慮し,
が異なる場合,それぞれのスパンでのベルトの伸びを考慮し,
 :プーリ2
:プーリ2 :プーリ3
:プーリ3 1 人が参考になったと評価しました
1 人が参考になったと評価しましたこの回答は参考になりましたか?良ければクリックください